


4月25日,日产汽车举行了全自动驾驶技术说明会,展示了“道路实况感知(ground truth perception)”技术。
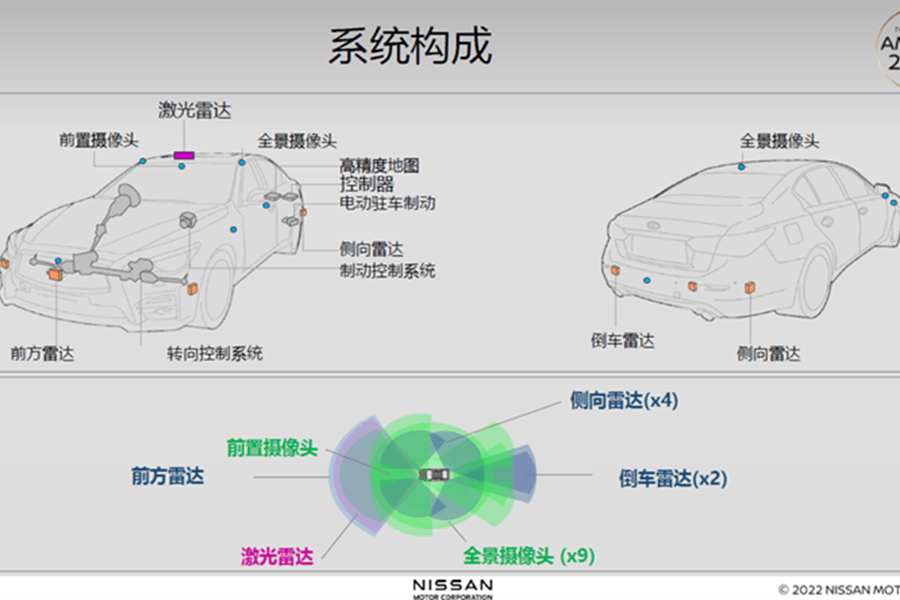
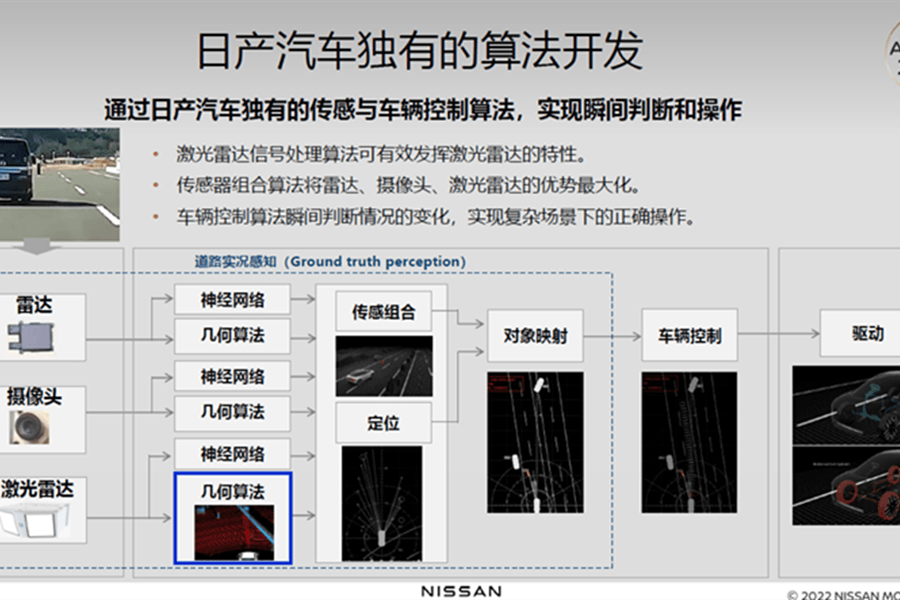
这一技术融合了下一代高性能激光雷达(LIDAR)、雷达和摄像头所感知的信息,可实时、准确地探测目标物的形状和距离,以及车辆周边区域的空间结构。利用这些信息,车辆可瞬间分析当前状况进行判断,并自动执行避免碰撞的操作。同时,该技术还能探测到远处的减速车流和道路障碍,自动进行车道变更。
需要提及的是,在缺乏详细地图信息的情况下,仍然能为驾驶员提供强有力的辅助驾驶支持。

在说明会的主题演讲后,日产汽车公司高级副总裁浅见孝雄和日产汽车公司AD/ADAS先进技术研发部部长饭岛彻也接受了媒体的群访。
浅见孝雄表示,日产汽车计划在2020年代中期完成道路实况感知技术的开发工作,将首先搭载于部分新车型上,在2030财年的时候可以搭载到全部新车型上。他同时认为激光雷达经过几次升级换代,市场普及后才能显著降低成本,2030年可能会实现成本的下降。
饭岛彻也表示,下一代激光雷达旨在能够在时速130公里的情况下发现静止的车辆,并安全进行避让,能够捕捉到300米以外的静止车辆和物体。同时,就目前的性能水平来说,在应对劣天气条件下的性能恶化的问题,激光雷达要比雷达和摄像头更强大。
以下为群访实录,有删改。
嘉宾:
日产汽车公司高级副总裁 浅见孝雄
日产汽车公司AD/ADAS先进技术研发部部长 饭岛彻也

新技术2030财年搭载全部新车型
问:日产汽车的辅助驾驶系统,主要的应用场景是偏重于城市道路还是高速公路?新技术最快的上市时间、装车时间大概是什么时候?
浅见孝雄:日产已经售出了超100万台搭载了驾驶辅助系统的车辆。1996年推出的ProPILOT超智驾技术,主要应用场景为高速公路,这个技术需要驾驶员手握方向盘。ProPILOT 2.0于2019年推出,这一系统支持双手脱离方向盘,驾驶员可在高速公路上双手脱离方向盘进行驾驶。
本次介绍的是紧急避让操作自动化技术,无论是进行辅助驾驶还是全自动驾驶,都将大幅提升安全性能。我们希望可以在2020年代中期完成道路实况感知技术的开发工作,这项技术将首先搭载于部分新车型上,在2030财年的时候可以搭载到全部新车型上。
问:日产的自动驾驶技术与目前市场上普遍的技术(如特斯拉)差异点在哪,比如在硬件及软件层面。未来的技术路线是什么?将应用到哪些产品上?
浅见孝雄:从外观来看,目前各家企业的传感器配置有所差别,系统能够应对的交通场景也不一样。对于日产而言,比如高速公路场景下,在技术开发中我们会基于车速、是否握住方向盘,来设计合适的传感器算法、控制系统的驱动结构等。
很多情况下各企业使用的零件是类似的,我认为差异在于设计理念或者结构方面。
饭岛彻也:当今发生的一些关于驾驶辅助系统的交通事故,其中很多是由于事故场景超过了系统的能力,导致系统不能进行这些场景下的辅助驾驶。因此,对于这种场景下的事故,该如何通过技术去覆盖、去解决?我们认为必须提升安全性能,所以进行了这次技术的开发。
问:日产汽车计划到2030财年在全部的新车型上搭载下一代的激光雷达系统,在近8年的时间差里边,日产汽车会通过什么样的技术手段来维持自己在辅助驾驶方面的优势?

浅见孝雄
浅见孝雄:我们一直也很关注其他企业的动态。我们这次发布的技术处于研究开发的阶段,之后将进入量产化的阶段。当然两年、三年或者四年后可能又有新的技术会成为主流,所以8年后并不一定就只有这一项成熟的技术。
日产汽车自1990年开始研发驾驶辅助或者自动驾驶技术,近30年间一直保持着技术的领先地位,我们也在不断加速研发。
饭岛彻也:现在我们已经实现了可以在高速公路上双手脱离方向盘的技术。对于常用领域,我认为已经达到了相当高的水平。竞争对手今后也会不断研发这些技术。像高清地图HD-Map、本地化的GPS导航系统、摄像头以及雷达这些技术会逐渐成熟,性能将逐渐提升。我们会不断改善,提供安全性能高、方便使用的系统。
问:日产激光雷达方案中,选择的合作伙伴是哪一家?资料中看到日产激光雷达的布置方案是放在顶部,看上去是一颗激光雷达,实际上是多少颗激光雷达?在国内,有一些厂商会选择搭载两颗甚至四颗激光雷达,日产选择这样的方案,是基于怎样的逻辑或者想法?
浅见孝雄:我们将使用一个激光雷达,我们的合作伙伴是Luminar,当然并不是已经确定了Luminar就是日产的量产供应商,而是作为共同开发伙伴。
饭岛彻也:日产将只在车顶搭载一颗激光雷达。激光雷达探测的是车辆周围的空间和道路上行驶的车辆,也就是移动的物体。道路结构以及周边建筑物其实是静止的,而车辆在移动的时候周边的情景会发生变化。激光雷达可以感知到场景的变化并进行三维测量传达给车辆。
因此在车顶搭载一颗激光雷达基本就可以掌握周围的空间结构。雷达和摄像头是为了理解周围的交通信息。摄像头会用来理解场景含义,识别目标物具体是什么。雷达能够准确掌握周围移动物体的速度和方位。激光雷达则能够准确捕捉空间结构,再通过摄像头来理解前方障碍物的含义,雷达给出准确的运动状态,通过这三者的组合,最终实现类似人类的认知能力。
时速130公里下可发现静止车辆
问:目前的毫米波雷达和视觉传感器其实并不能很准确的识别静止物体,所以在高速道路上开启自适应巡航的情况下,面对静止物体很大程度都是无法精准识别出来,会导致发生交通事故。面对这种情况下,日产有什么解决方案?
浅见孝雄:目前日产的驾驶辅助技术是L2级别,也就是驾驶员需要进行驾驶。对于需要手握方向盘的车辆来说,如果驾驶员双手脱离方向盘的话,系统会发出警告,最严重的情况下系统会自动进行判断制动车辆。对于允许驾驶员双手脱离方向盘的系统来说,也会通过驾驶员监视系统来监测驾驶员是否在注视前方,如果驾驶员没有参与驾驶,系统会制止这样的行为。未来,本次介绍的道路实况感知技术能够准确识别静止物体的位置,使车辆在行驶中避免与其发生碰撞。
饭岛彻也:对于目前已实现量产的摄像头和雷达来说,探测范围比较有限,大概在60米范围内能够探测到静止物体。但如果是远程比如100米、150米或者是300米距离的话,摄像头和雷达很难实现对静止物体的识别。所以说在高速道路上行驶的时候,摄像头和雷达不能够判断出静止的物体,以致于发生了事故。

饭岛彻也
本次介绍的激光雷达旨在能够在时速130公里的情况下发现静止的车辆,并安全地进行避让,因此能够捕捉到300米以外的静止车辆和物体。与雷达和摄像头不同的是,激光雷达不能够识别目标物的含义,但如果地面上有凸起的物体,激光雷达能够准确判断物体的形状,从而判断出车辆能否跨越障碍物。如果激光雷达在远处发现障碍物并且无法跨越,这种危险情况下,可以通过变更车道避让,降低风险。通过采取这种组合措施,可以实现比现在更高的安全性能。
问:对于激光雷达在辅助驾驶系统中的定位,日产是倾向于把激光雷达作为辅助驾驶系统中的主要感知来源,还是作为感知的修正手段?另外,辅助驾驶系统根据感知方案的不同,如今大致可以分为两个派系,分别是纯视觉感知路线和多传感器融合路线。对于多传感器融合路线来说,在特殊情况下,不同的传感器会反馈给系统不同的、甚至是互相矛盾的信息。对于这种情况日产是如何处理的?
浅见孝雄:据我的理解,激光雷达在准确测量车辆与物体之间的距离方面,是发挥主要作用的传感器,但是也要根据传感器标准,结合摄像头和雷达,进行正确的判断和控制。
饭岛彻也:摄像头、雷达和激光雷达三者的关系,并不是说哪个为主哪个为辅,而是三者相辅相成、取长补短,将彼此最可靠的部分进行组合,以增强协同作用。这样的目的是提升仅靠单一传感器无法实现的性能。因此,激光雷达的主要作用是准确掌握空间结构和物体的形状,也就是准确地绘制车辆周围的坐标系。
但是,准确绘制的坐标系是单色的,它在黑白的世界里是没有意义的,所以需要使用由增强神经网络的摄像头来赋予它意义,添加颜色。此外,再添加上雷达最擅长的捕捉到的运动、速度和距离的信息,通过结合这三者的长处,实现非常接近人类的感知能力,这是单个传感器所无法做到的。
问:日产将如何降低激光雷达的成本?激光雷达本身容易受到下雪或大雾天气影响,日产如何保证这次发布的功能,可以在全天候的状态下进行工作?
浅见孝雄:目前我们正在研发紧急避让操作自动化的技术,已经进入到了评估激光雷达性能并开发算法的阶段。关于降低成本问题,我认为激光雷达可能会经过几次升级换代,直到在市场上普及后才能显著降低成本。2030年这个时间节点有可能会实现成本的下降。如果这项技术不能在足够实用的范围内使用的话,是无法实现商用化的,因此我们也在努力解决这个问题。
饭岛彻也:关于恶劣天气下激光雷达的性能降低这方面,因为是光学传感器,所以前面如果有脏污或者是鸟粪之类,就不能正常工作。因此需要在前面加装雨刷器、清洗器或者是水洗装置等。但是,对于阴雨天气,由于激光雷达使用非常细的激光束进行扫描,因此并不意味着垂直落入空间中的单个水滴每次都会将所有光束挡住,它会在数个循环中填补前方的景象,也可以说是软性再现雨滴背后的图像。因此,就目前的性能水平来说,在应对劣天气条件下的性能恶化的问题,激光雷达要比雷达和摄像头更强大。
模拟分析中国现有交通环境进行技术验证
问:中国的车企其实现在已经实现了激光雷达的量产上车,在二位看来,这对于整个行业具有什么样的意义,这是否会对日产在智能驾驶技术的研发战略方面会有一些影响?
浅见孝雄:随着各家企业开始采用激光雷达,这对于激光雷达的供应商来说,将极大地促进激光雷达的普及,这是一个非常受欢迎的举措。这样的话,激光雷达的性能会提升,产量也会增加。
饭岛彻也:我们这次介绍的原型车主要是针对紧急避让性能这一环节开发的。但我认为激光雷达具有能够提高各种性能的潜力。我想各企业会用自己的智慧来思考如何利用激光雷达,比如在常用领域能进一步提升易用性。我们在参考这些信息的同时,来进一步提升紧急避让性能、以及常用领域的性能。
问:中国国内的路况是比较复杂的,技术理论跟实际的路况有很大的区别,在确保技术的稳定性以及中国路况环境的采集方面,日产如何适应中国的交通环境?
浅见孝雄:在是否会与物体碰撞这一点上可能全球各地都是差不多的,但是中国的路况的确有它的特殊性。日产汽车在上海设立了研发基地,这个团队目前正在投入相当大的精力,基于中国现有的交通环境进行模拟分析,来验证这项技术能否适用于中国的道路环境。光靠理论是行不通的,必须收集大量的数据。而且我也认为,有必要在现场进行验证实验,所以我希望上海的尖端团队能够以开拓性的形式进行开发。
问:日产如何看待当前以至未来,比如说三五年内,中日两国政策环境对日产自动驾驶技术应用的影响,日产会受到中日两国相关政策端的限制吗?
浅见孝雄:我认为未来的产品开发或产品发布上很可能会受到法规的影响。但是,据我了解,不同国家或地区的情况又大不相同。例如在日本,驾驶员双手脱离方向盘这样的功能是得到法律认可的,美国也是这样。欧洲、中国还没有这样的规定。关于L4级自动驾驶技术的研发,中国政府正带头积极进行研发,包括相关基础设施也在逐步完善,但在日本,包括基础设施在内的自动驾驶以及车辆的导入方面都还没有出台具体的政策。考虑到每个国家的政策,技术标准因地区而异,因此我认为必须要平衡全球通用标准和各个地区的情况这两方面的因素,来推进技术的开发。