


据外媒报道,丰田汽车自动驾驶软件研发公司丰田高级研究所(TRI-AD)成功完成了多项概念验证(PoC),展示了一款路面高精(HD)地图,该地图的相对精度达到50厘米以下。
在此类概念验证中,TRI-AD验证了以下两种方法对于构建高精地图都是有效的:
1、 利用从普通车辆摄像头获取的地图数据以及卫星图像,以构建自动驾驶地图信息,而不是利用传统的调查车等收集数据;
2、 通过转换数据格式,采用校正算法,将TRI-AD的自动地图平台(AMP)的车辆数据应用到其他公司的平台上。
利用此类概念验证的成果,预计可以缩短HD地图更新的延迟时间,迅速扩大HD地图的覆盖范围,并大幅降低HD地图的构建和维护成本。
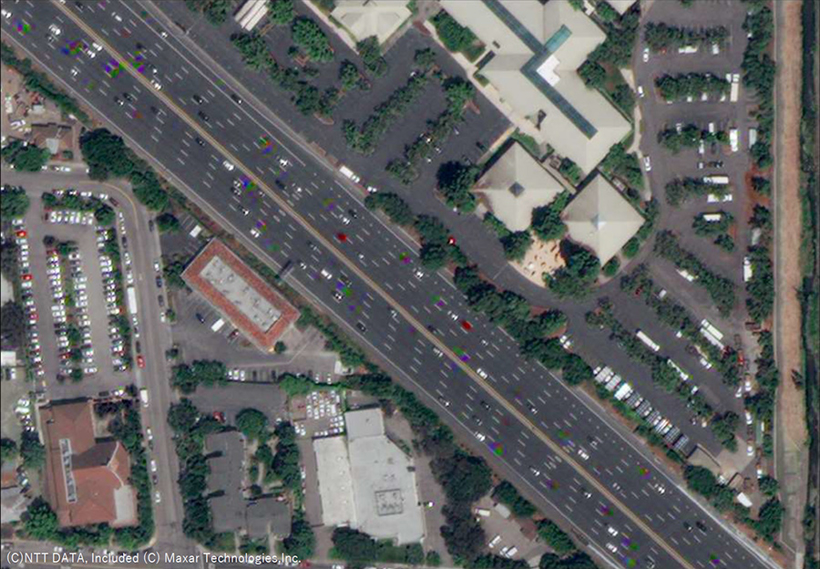
TRI-AD与Maxar Technologies公司(地球智能和空间基础设施创新者)和NTT DATA公司(日本领先IT服务提供商)合作了一项概念验证,自2019年4月25日开始,合作伙伴们利用最高清的商用卫星图像,为自动驾驶汽车自动构建HD地图。该概念验证表明,现在可以通过分析、移除和纠正非地图图像像素(如汽车、阴影以及卫星图像中因建筑物倾斜造成的遮挡),自动提取所需的地图信息。目前,TRI-AD已经创建了东京23个区以及全球6个城市相对精度达25厘米的地图,而且被证实,此类地图适用于自动驾驶车辆。

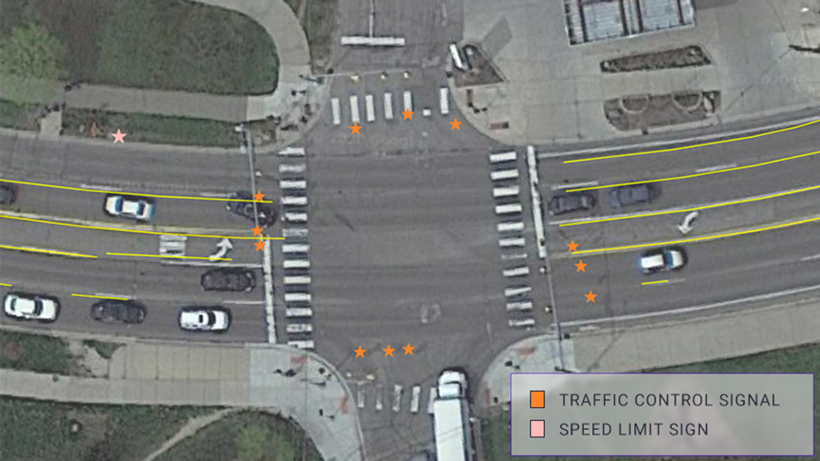
TRI-AD还与领先的道路智能技术平台CARMERA合作,成功实施了一项基于摄像头的HD地图计划。作为全球合作伙伴关系的一部分,该合作项目采用“行车记录仪”在东京23个区和美国的2个城市探测和定位关键道路特征,如车道标志、交通信号和标志等。该项目获取的HD地图的相对精度达到40厘米,可用于实现关键导航功能,也是仅使用摄像头进行探测以构建地图的一个重大进步。TRI-AD与CARMERA合作,采用了与CARMERA实时事件与变更管理引擎(Real-Time Events and Change Management engine)相同的硬件无关计算机视觉和处理技术,能够在几分钟内而不是需要几个月的时间就可探测、验证,并向CARMERA的再生HD地图系统提供关键的导航更新信息。TRI-AD和CARMERA通过采用全球内常见的消费车载摄像头,展示了构建下一代地图的可扩展方法。

TRI-AD还与TomTom公司合作了一项概念验证,TomTom是领先的独立定位技术专家。两家公司合作表明,自动驾驶所需的车道标记等低级别道路(城市道路)能够几乎实时在TomTom的HD地图上得到更新。该解决方案通过验证TRI-AD自动地图平台收集的车辆数据的可靠性,然后将数据转换,输入到TomTom的云端交易型地图制作平台,才得以实现。
TRI-AD还与全球领先的定位数据和技术平台HERE Technologies公司合作了该概念验证,通过纠正TRI-AD收集的车辆数据的错误位置信息,HERE能够采用其高级“自我修复”技术自动创建路面地图。HERE仅使用车辆传感器的数据,将数据输入其平台,并自动生成包含自动驾驶所需车道信息的HD地图。HERE的HD Live Map已经被全球最知名OEM L3自动驾驶汽车项目选用。(文中图片均来自丰田)