


提到“软件定义汽车(SDV)”,特斯拉是一个绕不开的话题。作为汽车领域对软件技术应用最为炉火纯青的车企之一,特斯拉凭借软件不仅大大提升了汽车安全性和品质,而且完全颠覆了传统功能汽车的造车模式和用车体验,可谓让很多车企望尘莫及,特斯拉也由此被认为是SDV的“先驱”。那么,在SDV趋势下特斯拉的先发优势究竟体现在哪些地方?
整车发布与软件发布分离
在特斯拉先进的造车理念里,将整车发布与软件发布分离,使得最新的功能得以用最快的速度传递给消费者是很重要的一环,而这主要是通过OTA来实现。
在特斯拉出现之前,车企花两到三年设计一款车并推向市场,然后规划下一代车的设计,收集用户新的需求,再推向市场,是行业普遍的做法。一辆新车具备哪些功能、能给予用户什么样的驾驶体验,基本在出厂的时候就已经确定了,此前没有人会认为汽车原来也可以像智能手机一样造,即先卖产品后通过软件赋能,不断优化已有功能,增加新的功能,持续改善使用体验,为用户提供新的使用价值。也或许有企业想到了,但没敢这么做,直到特斯拉的出现。
据统计,从2012年到2019年4月份,特斯拉总共进行了142次OTA升级,其中导入全新功能67次,优化交互界面逻辑64次,修复系统漏洞11次。“几乎每次特斯拉更新都会创造一次跨越式体验优化,实现一次产品价值重塑,打造一次用户热点。”长安汽车软件科技公司总经理张杰表示。

图片来源:特斯拉
例如最近特斯拉宣布将会对Model S和Model X的车机进行升级,升级之后车机将会拥有更快的运算速度和更流畅的屏幕操作,还可以显示蓝牙播放音乐的专辑封面、运行高画质游戏、支持5G Wi-Fi网络和4G 蜂窝网络、增强提供给驾驶员的可视化效果等,就对于客户体验有明显的提升效果。
更为重要的是,通过软件更新,特斯拉还可以为Autopilot 自动辅助驾驶系统持续不断地引入/优化新功能,比如新增车速控制、停车警告、调速功能,提升最高时速等,甚至对系统上的漏洞进行快速修复,以提升车辆的安全性和功能性。特斯拉近日发布的2020年Q2车辆安全报告就是最好的说明。
据了解,第二季度在有Autopilot参与驾驶的情况下,平均每453万英里的行驶里程会出现一起交通事故;在没有Autopilot参与但有主动安全功能的情况下,平均每227万英里的行驶里程会发生一起交通事故;在Autopilot和主动安全功能均未参与驾驶的情况下,平均每156万英里的行驶里程会出现一起交通事故。由此可见,虽然近几年特斯拉因Autopilot也引发了不少事故,但相较于不具备Autopilot的车型来说,在安全方面的提升效果还是十分明显的。
除了对于车辆本身性能和驾乘体验及安全方面的改善,特斯拉这种新的造车模式对于车企盈利方式也有了明显的颠覆。过去,车厂将新车交付给消费者之后,几乎无法再从消费者处获得新的收益,但特斯拉做到了。例如特斯拉的完全自动驾驶能力FSD,目前的选装价是6.4万元,而在7月份之前选装价还是5.6万元,据悉未来该系统的价格可能会随着新功能的推出进一步升高。

“这个在汽车领域是很少见的,卖一个配件通常是价格往下走的趋势,但现在特斯拉的FSD价格是上扬的趋势。” 地平线智能驾驶产品线产品规划与Marketing高级总监刘福成表示。“特斯拉可能要定义一种汽车领域的新模式,就是用户付费的商业模式,这样每个月都有一笔固定的收入。”另外对于部分功能的升级,特斯拉也选择了收费,比如此前为Model 3推出的“ Acceleration Boost”动力性能加速升级包,如果客户想要必须花费2000美元。最近,据悉特斯拉还酝酿开放对软件的授权许可,只要其他企业愿意付费,就可以直接使用特斯拉的相关技术。
电子电气架构高度集中化
支持特斯拉实现上述颠覆性应用的,是其同样先进的电子电气架构。随着自动驾驶、车联网等的快速发展,对整车电子电气架构也提出了新的需求,主要包括高计算性能、高通讯带宽、高功能安全性、高网络安全性、软件持续升级更新能力等,而现阶段分布式ECU架构的发展已接近瓶颈,无论是算力还是传输速率均已无法满足下一代智能汽车的需求,集中式域控制架构由此应运而生。
比如特斯拉Model 3通过采用算力强劲的中央控制器对不同的域处理器和ECU进行统一管理,将整车的电子电气架构分为三大部分:CCM(中央计算模块)、BCM LH(左车身控制模块)、BCM RH(右车身控制模块),其中CCM进一步整合了车上的ADAS(驾驶辅助系统)、IVI(信息娱乐系统)两大域及外部连接和车内通信系统域功能。如此一来可大大缩减整车上的ECU数量,同时实现域内算力有效利用,核心计算性能大幅提升,复杂功能开发难度大幅下降。
不仅如此,特斯拉集中式的电子电气架构还可以明显降低软硬件的耦合性,通过软件架构分层解耦,更有利于 OTA 的应用软件升级。且将中央计算平台作为整车的最高决策模块,统一对采集的数据进行处理并指挥相关执行机构进行操作,还可以帮特斯拉将整车的硬件设计和软件研发更好地掌握在自己手里。

基于高性能的中央计算模块,Model 3很好地实现了算力集中统筹,降低了每个分离式ECU需要担负的运算重任,同时避免了之前各供应商的ECU各管一方,算力难以相互支持的情况。特斯拉自研的操作系统,则可以管理整个汽车软件系统,在整个汽车生命期内实现Bug修复、功能导入以及软件优化等。
此外,由于特斯拉在车内同时采用以太网和传统CAN/LIN总线,其中CCM内通过以太网连接,其他ECU主要基于总线网络连接到CCM,得以更好地满足智能汽车低延时、高速率传输数据的要求,同时有效减少整车线束长度。据悉,Model S内部线束长度长达3千米,而Model 3只有1.5千米,Model Y更少,仅100米。线束长度的大幅减少,带来的是更低的整车制造成本和更好的轻量化效果。
比较之下,在传统的整车电子电气架构里,由于ECU数量众多——部分高端车型甚至已经采用了超过100个ECU,而不同的ECU来自不同的一级供应商,有着不同的嵌入式软件和底层代码,导致整车企业很难对ECU进行更新和维护。更别谈添加一些复杂功能,往往要牵扯到多个不同的软硬件系统,不仅操作难度较大,还会让原本就异常复杂的分布式电子电气架构更加臃肿。而且现有的整零合作关系也无法为整车厂实施如此大规模、深层次的更新提供强有力的支持,因为各种各样的利益关系。
所以即使到现在,传统车企里面能够像特斯拉这样通过 OTA 对动力系统和底盘系统等进行有效的功能新增和功能优化的并不多,大家更多停留在SOTA 层面,如市面上常见的车机系统 UI 界 面、导航地图和影音娱乐系统等的升级,实际用户体验也随之大打折扣。
不过,为了更好地顺应汽车智能化发展趋势,目前传统车企在整车电子电气架构方面也在积极求变。比如宝马和丰田在下一代架构中均表示将引入“中央集中+区控制器”方案,前者将在2021年实现量产,除此之外主流Tier 1和ICT企业也在开始布局部署E/E架构,在各类玩家的密集布局下,该领域正呈现多方博弈的竞争格局。
避免大包大揽
作为一家走在汽车行业创新前沿的车企,特斯拉的很多做法在业内都是史无前例的,这也决定了在一些技术的开发上,特斯拉常常很难找到满意的供应商。比如FSD芯片,在先后使用了多家供应商的产品,都没有达到满意的效果后,特斯拉毅然决定自研芯片,以进一步扩大在智能化和无人驾驶领域的领先优势。
在车载操作系统方面,特斯拉也选择了自主研发。按照特斯拉的说法,这样可以让整个系统更封闭,安全性更高,系统运转更流畅,且与自动驾驶系统相连接后,可扩展性更好,随之带来更好的用户体验。
另外,在BMS、中控系统总成、电机控制器、电控制动等方面,Model 3也选择了使用特斯拉自己的技术。不过,尽管有着强烈的“自力更生”精神,在造车这件事上,特斯拉也并非完全大包大揽,而是有所为有所不为,对于不是很核心的技术还是选择和对应的供应商合作。也即是明确了自己的技术控制点,更长远来看,这也是传统车企在软件化转型过程中需要引起重视的。
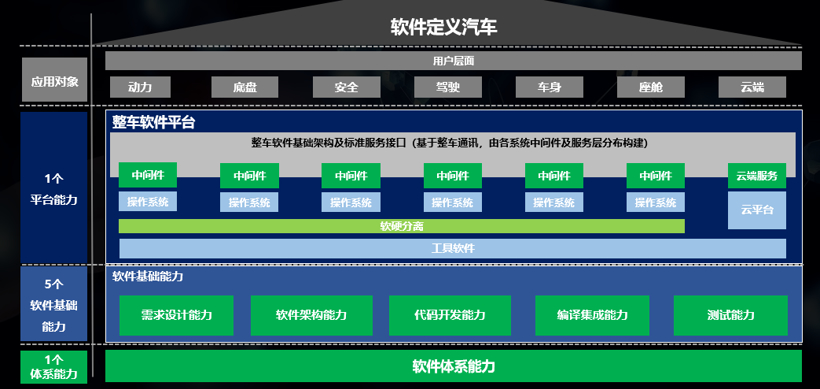
图片来源:长安汽车
值得一提的是,现在很多车企面对SDV趋势也开始有选择性地进行开发。比如长安汽车在软件方面主要围绕“1+5+1”来构建能力,即1个整车操作系统,需求设计、软件架构、代码开发、编译集成、测试5个软件基础能力,1个软件体系能力,支持长安汽车做这些的,是整个团队的五十多名员工。
“我们只做一些中间件,然后向下建立一些标准化的接口,这样即使我们的硬件平台切换到不同的供应商,依然能够保持整个软件架构或者软件平台不变。” 长安汽车软件科技公司总经理张杰指出。“而对于上层的应用生态,考虑到互联网公司已经具备比较成熟的解决方案,我们把权限也放出去了。”
这样做的好处是既可以缩减不必要的投入,又可以在关键技术的突破上更聚焦。毕竟SDV是一个十分复杂的工程,不仅仅是简单的把软件应用在汽车上,更关键在于用好。怎样才算用好?上汽软件中心首席架构师孟超认为核心在于整个生命周期内为汽车赋能,学习用户、车辆自身、周围环境,并适时作出适应性调整。在此基础上满足两大需求:第一,用户需求,如拥有丰富的自选应用、OTA更新软件、无需变动硬件;第二,OEM 期望,如更短的开发周期、丰富的车辆变型、SOP后快速的迭代更新。
这就必然需要花费大量的人力、物力和财力,甚至还会面临组织架构、业务体系、开发模式、经营管理模式等多方面的调整,否则大众也不会提出组建拥有超过5000名软件开发专家和顶级人才的研发团队,并且为新部门专门投资了70亿欧元。更何况即便做到这种程度,大众依旧问题不断。由此可见在整车软件化趋势下,传统车企面临的形势还是十分严峻的,哪怕大家已经有了特斯拉这样一个优秀的榜样,短时间内想在软件领域复制这份成功并非易事。