


8 月 25 日,由盖世汽车主办、中国智能网联汽车产业创新联盟自动驾驶地图与定位工作组协办的“2020 第二届自动驾驶地图与定位大会”隆重召开。本次会议主要聚焦高精地图、高精度定位等自动驾驶关键技术,共探产业未来发展之路。下面是广州导远电子科技有限公司副总工程师司徒春辉在本次论坛上的发言。

广州导远电子科技有限公司副总工程师 司徒春辉
今天的主题是关于高精度定位在HWP(High Way Pilot,高速公路自动驾驶)场景下的需求分析。很多主机厂客户经常问我们,怎样的定位精度才能做好高速自动驾驶(HWP)的应用?今天会聚焦到一个很具体的话题:关于高精度定位在HWP场景下的需求分析。
今天的话题包括以后三部分:
1.如何满足HWP下定位的安全条件;
2. HWP下有多大的概率可以顺利通过1公里的隧道;
3. HWP应该选用双频还是单频RTK方案;
4. 导远电子的新品介绍。
首先,我们来探讨一下,乘用车在高速公路的场景下实现L3+的HWP需要怎么样的精度定位要求? 根据中国高速公路设计基本参数和乘用车最大尺寸,对乘用车的横向定位精度要求是0.2米,纵向的精度要求是1米,置信度95%。在车身刚好压线的极限情况,横向定位精度必须小于0.78米,纵向精度小于3米,置信度大于99.7%。在匝道、互通式立交,定位精度要求更高(表1)。

表1
如果定位超出了上述定位精度要求,会有怎么样的危险?就如下第一种情况,车辆行驶在左车道,因定位偏差误认为在右车道,在超车时就会驶向对面车道,产生碰撞危险。同样、在交通拥堵、故障停靠等情况下,定位的偏差也会导致危险情况的发生(图1)。

图1 定位误差可能导致的后果
在进入到具体参数要求的讨论前,我们先来回顾一下典型的融合定位系统原理(图2),主要由前融合和后融合两部分组成:前融合的主要输入包括IMU、GPS以及车辆信息。前融合中通过四元数积分、EKF等算法得到6自由度的位置、速度、姿态和时间消息;后融合根据前融合的定位结果,把地图中的车道线、路标等几何要素信息,与从ADAS摄像头得到的同类信息进行匹配融合,最终形成一个高精确的定位结果。后融合的定位结果也可反馈到前融合,作为观测量。
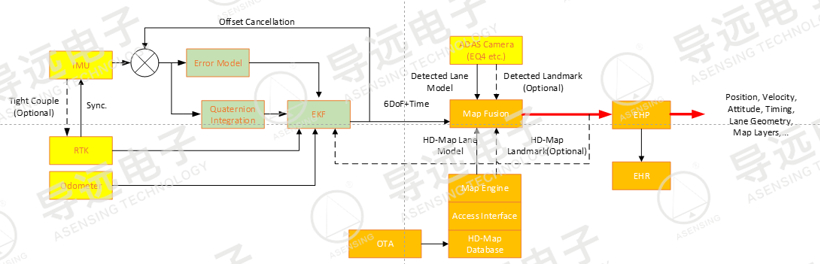
图2 基于HD-MAP的融合定位架构
HWP下定位的安全条件可以认定为需要保证任何情况下行驶300m内横向位置误差需要小于等于0.78米,,以确保车辆行驶的安全。对于300m行驶距离,在最高限速120km/h的情况下,不短于9秒的行驶时间。这意味着,一旦RTK定位和车道线识别异常,可以提供最短9秒的安全接管时间。高精度定位维持了位置坐标参考,可以在故障容错时间内对RTK飞点和车道线异常识别提供了依据。这同时也是降低HWP的接管率的需求,根据统计,良好的双频RTK接收机在高速行驶中85%的RTK失锁时段在5s以内,9秒以上的航位推算时间,可以覆盖绝大部分的RTK定位短期中断的情况,有效降低接管率,提高驾乘体验。
要实现上述安全条件,我们接下来对DR航位推算的性能做如下分解。为了考虑较坏的情况,设定车速为60km/h,300m推算时间18s。
第一步:一般IMU参数为1 σ指标,假设误差服从正态分布,3σ结果可以认为是1 σ指标的3倍,那么问题转化为:要求300m航位推算,3σ横向误差要小于0.78米,主要由IMU、里程计和定位算法保证,相当于要求推算精度为2.6‰D(3σ);
第二步:对0.78m的横向误差做分解,假设50%来自零点漂移,50%来自于陀螺标度误差,即各自造成0.39m的误差。根据DR推算的简化模型:
![]()
可以算出允许的陀螺零漂是10°/h(1σ)。
第三步:对10°/h的零点漂移再进一步分解:假定零点漂移80%是由零偏不稳定性引起,剩余20%来自零位温漂的影响。持续时间τ=18s,Allan方差值是8°/h,对应的100s零偏不稳定性是4°/h。如温度漂移为对于2°/h,且假设温度波动为1°C/min,可以得到对陀螺全温零偏(1σ,-40~85°C)的要求±0.115°/s;
第四步:对于标度误差引起的定位误差,假设弯道半径250米,时速60km/h,得到转弯角速率3.78°/s,横向误差0.39米所对应陀螺标度误差最大是2.2‰。
第五步:同时根据高程误差和俯仰角的关系:
![]()
在高程最大允许误差1.4m的条件下计算得加速度零偏误差:
![]()
第六步:在算法模型、弯道曲率和路面状态良好时,结合车辆的轮速、档位等信息,纵向的推算精度可达到1‰(95%)或1.5‰(99.7%)。
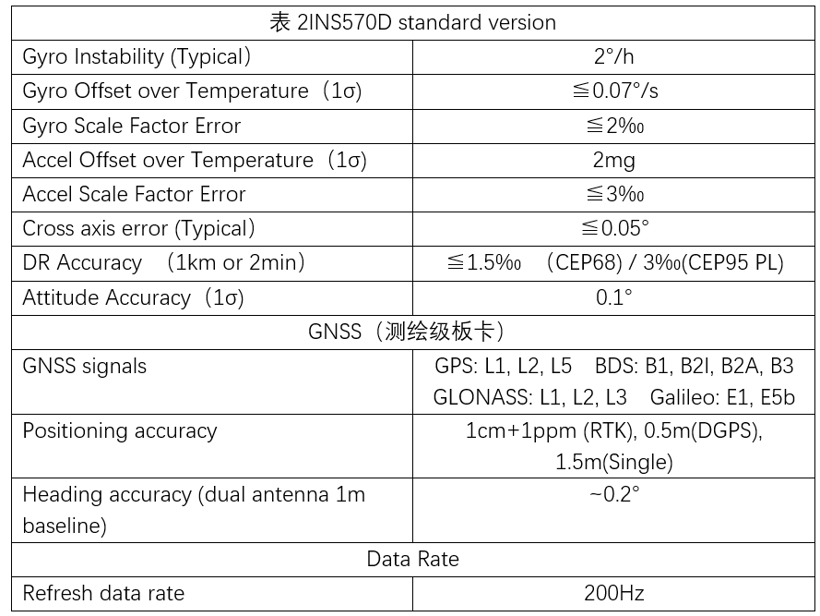
可见INS570的规格(表2)不低于上述估计的需求指标,部分指标较优。我们继续随机抽取了6台INS570D,在广深高速进行了500+次的航位测算测试,横向累积误差达到0.78m时的里程和时间分布如下(表3):
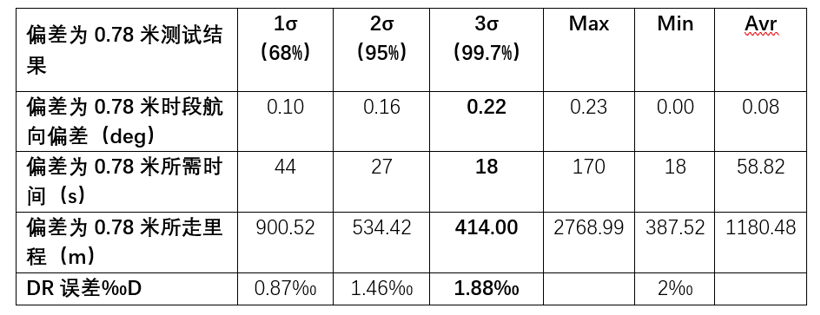
表3
得到偏差小于0.78米所经历的里程,在3σ的结果是414m,意味有99.7%的结果行驶里程超过414m。1σ可以达到900m行驶里程。 偏差<0.78m行驶里程分布主要在500m到2000m范围内(图4),偏差<0.78m的持续时间主要分布在30s到100s范围(图3)。
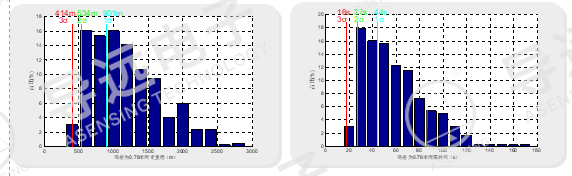
图3 横向累积偏差达0.78m时所历经的里程(左图)和时间(右图)
综合上述分析,要满足HWP下定位的安全条件,首先需要有模型完备融合定位算法;并且需要使用高性能 IMU,相关指标包括:陀螺零偏不稳定性<4°/h,陀螺全温零偏<±0.1°/s,陀螺标度误差≤2‰,加速度计零偏≤2mg,以及双频RTK接收机。
导远的INS570D组合导航设备能保证400m距离航位推算的横向误差≤0.78m(置信度>99.7%),在硬件设备满足了安全条件的基础上,我们再来看HWP下有多大概率可以顺利通过1km的隧道?我们对1km的隧道场景做了6种合理化的假设:

图4: 1km INS570D隧道内定位推算,红色轨迹:RTK,蓝色轨迹:组合定位
l 隧道中(RTK/GNSS不可用)
1) 车道线识别正常(概率90%)
2) 车道线连续识别异常<400m(车道线缺损、拥堵、积水等,概率8%)
3) 车道线连续识别异常>400m(车道线缺损、拥堵、积水等,概率2%)
l 隧道内车道线正常, 出隧道后
4) RTK INT恢复&车道线识别正常(概率70%)
5) RTK INT未恢复 & 车道线线识别正常(网络信号恢复延迟、遮挡等,概率20%)
6) RTK INT未恢复& 车道线线识别异常(网络信号恢复延迟、遮挡加上车道线缺损或雨天,概率10%)
下面是详细分析:
1)隧道中车道线识别正常时,是能够满足HWP安全要求的;
2)隧道中车道线识别异常,但推算里程<400m,通过高精度IMU+轮速的融合方法,推算距离比较短,横向偏差<0.78米,也能够满足HWP的安全要求;
3)而在隧道中车道线识别异常且推算距离超过400m的场景下,横向偏差>0.78m,不能满足HWP的安全要求。
4)当出隧道后,车道线识别正常,RTK也恢复正常,能够满足HWP的定位要求;
5)出隧道之后车道线识别正常,但GPS还没有恢复到RTK状态下,通过单点GPS+IMU+轮速+车道线匹配的融合方法,横向精度能够满足HWP要求,对于纵向精度,持续推算时间过长,纵向精度会逐渐降低——假设在隧道内已经推算了1公里的距离,在隧道外再继续推算1公里,纵向误差可能就会达到3m(置信度99.7%),此后只有单点GNSS保持纵向位置,没法满足置信度和安全要求,因此超过1公里后,纵向精度就可能不能满足HWP的要求,需要做降级处理;
6)出隧道后车道线识别异常,RTK也未恢复,航位推算的距离超过400米后,HWP将做降级处理。
对上述场景进行汇总(表4),在隧道内,车道线识别异常而且航位推算距离>400m不能满足HWP的安全要求,在出隧道之后车道线异常,RTK没有恢复的情况下,航位推算距离大于400m,也不能满足HWP的安全要求。
隧道中,98%的概率HWP可用
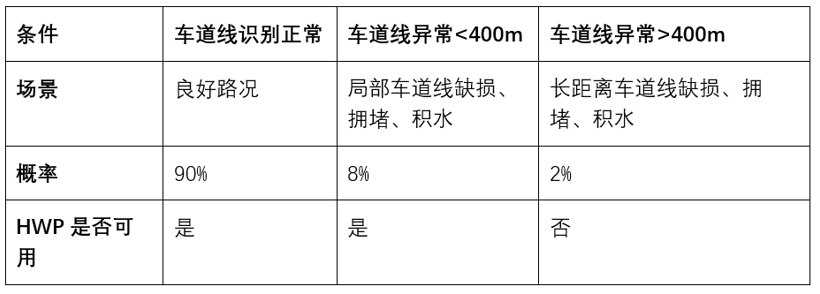
出隧道后,93%概率HWP可用
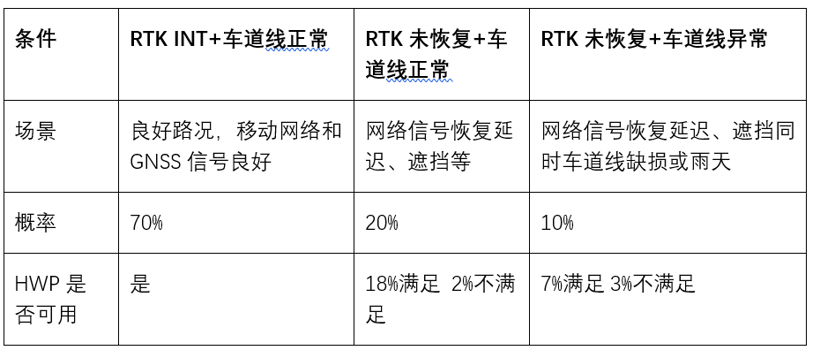
表4
最后关于双频和单频的选择,我们也做了三种组合的测试,来回答这个提出频率很高的问题。第一种是双频车规GNSS+双频RTK服务,第二种是双频车规GNSS+单频RTK服务,第三种是测绘级接收机+双频RTK服务(表5)。不管是从定位精度还是恢复时间,单频RTK结果差恢复时间和固定解定位精度都比较差。单频RTK比较差的定位精度也会导致允许的安全推算距离会降低。所以双频GNSS接收机和双频RTK服务会是较优的选择。

表5
关于导远电子,公司总部位于深圳,在广州、苏州、海门设有子公司,北京设有分公司,目前在广州和海门的工厂均满足IAFT16949车规级质量体系,同时公司开发流程遵循ISO26262和ASPICE体系。针对不同行业客户对性能和成本的要求,我们相应推出了两款新的产品:
1)高精度定位产品INS570H,零偏不稳定性0.8°/h,全温零偏<0.01°/s和1mg,支持千寻findTrace后处理,DR推算精度达0.5‰。它的指标相较INS570D提升了3+倍;
2)另外一款是标准组合导航产品,在价格有很大优惠。
公司OEM合作案例包括,乘用车、小巴、货车,和商用车,其中乘用车项目已于2018年实现SOP,目前也已增至数款SOP产品,具备丰富的前装量产管理经验。