


随着科技的不断发展,自动驾驶技术日趋成熟。车辆通过感知周围世界来进行自主导航,但这一切都基于对车辆定位精确性和安全性的承诺和保障。为了实现自动驾驶汽车的各种复杂功能,精确而又可靠的位置信息开始变得不可或缺。

拥挤的城市峡谷环境对自动驾驶汽车传感器阵列带来了巨大的挑战。当自动驾驶汽车在失去GPS/GNSS信号的情况下试图左转时,IMU技术开始凸显它的重要作用
感知传感器作为自动驾驶主动决策的主要信息来源,可以感知车辆周围的世界。包括雷达,激光雷达,红外,超声波和摄像机视觉等,但所有这些都需要强大的计算能力作为支撑后盾。
导航系统能够告诉自动驾驶汽车它们在哪里,它们需要去哪里。这些系统由GNSS / GPS接收机和INS(惯性导航系统)组成,而惯导系统包括惯性运动传感器和来自里程计和转向传感器的输入。
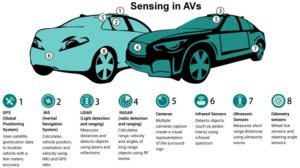
自动驾驶汽车常用的八种传感器
长期以来,基于MEMS的惯性传感器(如陀螺仪和加速度计)已作为分立元件应用于车辆的碰撞检测、安全气囊弹出和电子稳定性控制。 使用MEMS或光纤技术的高端IMU(惯性测量单元)通常用于飞机和战术制导系统,其性能比传统MEMS传感器高出10到1,000倍。
随着自动驾驶汽车技术和安全标准的进步和完善,IMU和INS所需的定位精度已接近航空航天和战术级设备标准——统一且可靠的厘米级精度,而非米级精度。
截止目前,能够达到这种性能水平和安全性的IMU对于汽车等大批量市场来说依旧十分昂贵。但现在我们看到了设计和制造方面的创新,能够使高性能IMU技术在广泛的自动化应用和工业应用中更具价格优势。
为什么是IMU?
IMU是一个电子模块,通过集成多个惯性传感器以生成沿多个轴或自由度的加速度和角速度测量值。六自由度(DOF)IMU由三轴陀螺仪和三轴加速度计组成。 使用扩展卡尔曼滤波器(EKF)将这些传感器随时间变化的测量值进行组合,可以进行高精度的位置,速度,姿态或方向计算。航姿参考系统(AHRS)将磁力计读数与IMU数据相结合,以计算航向,侧倾和俯仰。INS添加了GPS以跟踪物体的位置,方向和速度。
在典型的自动驾驶汽车应用中,INS结合交通路线、高清地图以及感知传感器系统来确定车辆路线以及如何进行导航。当所有系统在良好的环境条件和卫星覆盖范围内正常运行时,带有传统汽车级IMU的INS通常可提供足够的定位精度和可靠性,以确保安全运行。
然而,外部条件往往并不理想。通常,由于城市峡谷、隧道、立交桥、多路径误差或卫星覆盖范围较差时,GPS信号会丢失或减弱。除此之外,车辆还可能会遇到其他棘手的状况,例如降水或反射面,这可能会影响相机、激光雷达或雷达系统数据的性能和完整性。
当用于导航的其他传感器数据异常或者由于环境原因中断时,导航任务会转向于依赖航位推算系统。这时,自动驾驶系统主要依赖于IMU,车轮轮速传感器以及视觉传感器。此时,使用合适级别的IMU就尤为重要,无论环境条件如何,IMU都能持续感知并提供位置信息。
MEMS器件中固有的偏差和漂移误差会给系统带来一定的负担,需要及时消除。另外,没有被补偿消除的误差会累积成位置误差,而在温度和时间上经过严格校准的高端IMU可以大大减少这些误差源。内置冗余的IMU可提供更高精度的位置估计,并为整个自动驾驶汽车系统和传感器融合网络带来更高的安全性、完整性和可靠性。
实时动态
在精密INS定位中另一个令人瞩目的发展趋势是GNSS RTK(卫星导航实时动态定位)技术的出现和发展。 RTK与IMU数据适当融合后,可将GPS定位精度提高100倍,从米级精度提高到厘米级精度。RTK技术通过消除电离层和对流层延迟,多径,卫星时钟和星历误差(由GPS接收器在位置计算中使用卫星的位置造成的误差)来完善从GPS信号接收的位置数据。 RTK系统使用测量级基站,该基站通过蜂窝信号向移动站(移动的物体或车辆)广播校正。通过复杂算法和卡尔曼滤波器将校正数据与GPS和IMU数据融合,来实时输出流动站的精确位置。

RTK定位和定位技术对于包括农业,建筑,机器人交付,无人机和消费者自动驾驶汽车在内的广泛自动驾驶应用都非常有价值。
截至目前,RTK和其他类似服务仍需高昂的价格和漫长的获取时间。因此,它们主要用于农业,土地调查和施工应用。随着自动驾驶汽车的普及及其对精确定位的需求,催生了可跨地域扩展的新型RTK软件,该软件经济实惠,易于集成,并优化补充了自动驾驶汽车传感器融合定位导航功能。
对于任何一辆自动驾驶汽车来说,精确地了解自己的位置和周围环境、目的地以及如何到达目的地都至关重要。尽管当下尚不确定无人驾驶汽车何时会成为消费产品,但这项技术已经在一些行业领域得到了广泛应用。结合先进的IMU和RTK,有望进一步提高和完善系统性能、安全性和完整性,早日使惯性导航系统实现大众化。