



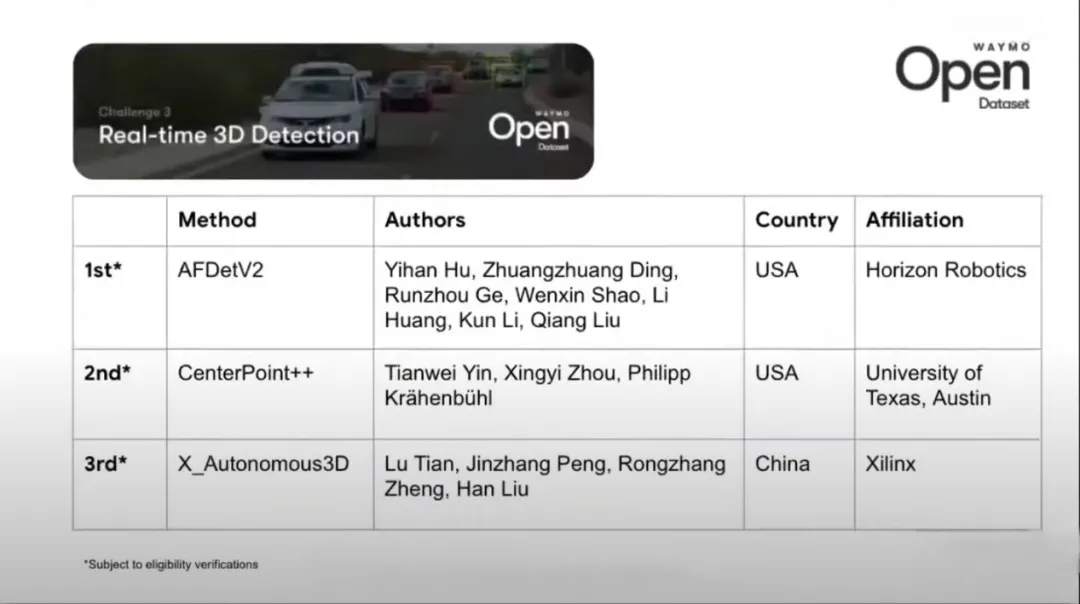
美国当地时间 2021 年 6 月 20 日,CVPR 2021 自动驾驶研讨会揭晓了本年度 Waymo 开放数据集挑战赛的最终结果,地平线团队凭借 AFDetV2 模型获得了实时 3D 检测项目的第一名,AFDetV2-base 模型则获评为 Most Efficient Model。地平线继 2020 年荣获 5 项挑战中的 4 项全球第一后,再次摘得桂冠。
CVPR 2021 公布获奖页面截图
作为自动驾驶领域中算法研发方面最著名的国际性大赛,本届 Waymo 开放数据集挑战赛旨在鼓励对感知与行为预测进行新的研究,Waymo 开放了其自动驾驶车辆在 25 个城市收集的超过 1000 万英里、570 个小时的自动驾驶道路数据,超 10 万个城市真实场景,吸引了包括清华、滴滴、赛灵思、伯克利、德克萨斯大学、南洋理工大学等在内的 30 余支学术界和产业界顶尖自动驾驶研发团队参与。
本次挑战赛共设四个项目,包括动态预测、关联预测、实时 2D 检测及实时 3D 检测。地平线团队参加了实时 3D 检测(Real-time 3D detection)项目的角逐。得益于强大的算法基因和软硬结合的综合实力,地平线团队在 实时 3D 检测挑战赛中斩获第一名。
竞赛夺魁 最强自动驾驶感知验证顶级算法实力
本届 Waymo 竞赛较上届而言,对实用性的追求更进一步,如在物体检测之外,添加了行为预测项目;同时还在检测项目中加入了实时性的要求,规定所有模型的执行时间必须要小于 70ms 才能入围。地平线团队凭借在算法领域的长期技术沉淀和自动驾驶研发的经验积累,力压其他竞争对手,产出了在模型算法上更注重时效性,更贴合实际应用场景的成果,最终拔得“实时 3D 检测”项目头筹,并获得“Most Efficient Model”称号。
感知能力是自动驾驶的起点与基石。地平线通过“算法+芯片”软硬结合,面向智能驾驶场景,聚焦视觉感知,提供智能驾驶核心解决方案。地平线团队此次在实时 3D 检测项目中的表现,展现了其在智能感知方面的高水准,一系列关键技术的实现,不仅是地平线团队对先进算法的创新性运用,也体现了其强大的工程能力,能够在贴合实际应用场景的前提下,实现高精度、低延迟,不断提升感知的准确性。
值得一提的是,地平线连续两年参加 3D 物体检测项目角逐,2020 年的参赛模型至今仍是 Waymo 竞赛榜单上检测精度最高的模型,而今年的参赛模型成为 Waymo 竞赛榜单上实时性检测第一名。连续两年获得算法挑战赛第一,同时拥有 3D 物体检测精度最高和实时性最高的 3D 物体检测模型,充分体现了地平线世界领先的算法实力。
开放共赢 打造草木繁盛的智能汽车生态
作为全球领先的边缘 AI 芯片企业,地平线以技术为信仰,以开放为路径,将行业领先的算法能力和芯片产品开放给行业合作伙伴。基于地平线强大的算法能力,地平线不但可以设计最先进的 AI 芯片和算法开发工具链,而且提供开放高效的软件生态支持,与合作伙伴深度合作、高效协同、敏捷开发,加速智能驾驶的应用落地。
目前,已公布搭载地平线征程芯片的有长安UNI-T、奇瑞蚂蚁、智己汽车、长安UNI-K、广汽埃安AION Y、岚图FREE、江淮汽车思皓QX、广汽传祺GS4 Plus、上汽大通MAXUS MIFA概念车、2021款理想ONE等车型。而更多搭载地平线征程系列芯片的车型将陆续发布。
未来,地平线将坚持开放共赢的生态模式,底层赋能、高效支持客户开发智能驾驶算法,打造草木繁盛的智能汽车生态,加速智能驾驶落地进程