推荐两个感知方向:多传感器融合和点云目标检测
多传感器融合
多传感器融合是结合多传感器数据的综合性前沿内容,主要包括Camera、LiDAR、IMU、毫米波雷达等传感器的融合。重要职位;随着AI技术的大规模落地,途胜、百度、滴滴、Waymo、Momenta、华为、纵目科技、智家科技、Wincher科技、小鹏、蔚来、幻视等公司都开始逐步落地自己的L2 ~L4级辅助/自动驾驶产品,从自动泊车、车道保持、行人障碍物预警、定位、测距、跟踪等任务都离不开多传感器融合、前视摄像头、鱼眼摄像头、毫米波等传感器雷达、激光雷达和IMU协同工作,鲁棒性和精度均高于单一传感器,因此被多种解决方案采用,相关技术受到更多关注;
自动驾驶继续受到资本青睐。 2021年以来,我们接连传来好消息,多家自动驾驶企业获得超过4亿美元的投资,如专注重卡领域的独角兽公司Momenta、途胜科技、智家等。目前,重载无人驾驶汽车途胜科技已经成功上市,智家科技也传出即将上市的消息,可见自动驾驶赛道潜力巨大。相关公司对多传感器融合工作的需求不断增加。华为、百度、途胜、滴滴、Momenta、小鹏、蔚来等公司更是高薪聘请相关人才,助力相关产品开发。
但是由于进入门槛高,无论是大学还是企业,涉及自动驾驶感知集成的课程都很少,这让很多对该行业感兴趣的童鞋无从下手,而这正是正是研讨会推出的。本课程的初衷是帮助你通过一些工程项目经验进入自己喜欢的行业。
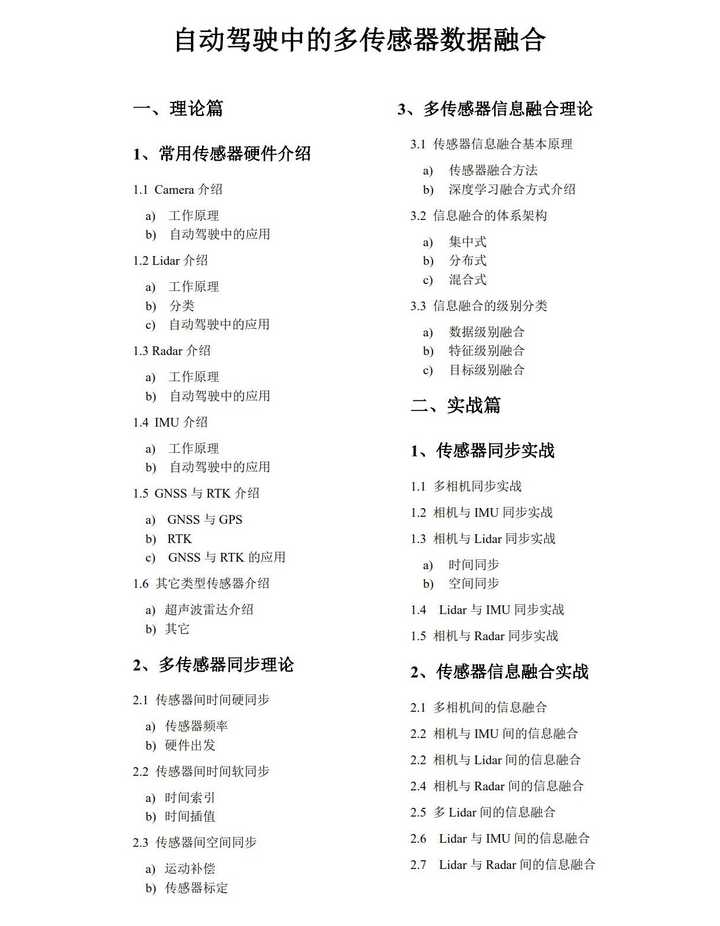
《自动驾驶中的多传感器数据融合》课程主要分为理论篇和实践篇两大模块自动驾驶方向,由来自知名自动驾驶公司的两位算法人员主讲。理论部分主要介绍自动驾驶常用的传感器硬件,传感器之间的时间同步和空间同步,多传感器之间信息融合的理论知识;实践章节比较偏向工程应用,工程中如何实现传感器之间的同步与融合等。课程大纲如下:
课程学习链接:国内首个自动驾驶多传感器数据融合课程
3D 点云检测
对象检测越来越偏向于 3D 对象,尤其是基于点云数据的检测网络。 3D检测用于获取物体在三维空间中的位置和类别信息,主要基于点云、双目、单目和多模态数据。其中,点云数据由于其丰富的几何信息,比其他单模态数据更稳定。基于激光雷达点云数据的3D目标检测技术越来越多地应用于自动驾驶和移动机器人。 随着AI技术的大规模落地,途胜、百度、滴滴、Waymo、华为、纵目科技、智家科技、Momenta、Wincher科技、小鹏、蔚来、幻视等公司开始逐步实施自己的For L2~L4级辅助/自动驾驶产品,3D检测作为自动驾驶的核心技术,在空间感知上优于2D任务。两者的融合可以进一步提升产品的性能,所以无论是学术界还是工业界都在关注。近年来,CVPR、ECCV、ICCV等计算机视觉会议开始逐步提高相关岗位的就业率。业界也陆续推出了兼顾精度和速度的一系列算法。未来可期!
3D目标检测进一步分为基于单目、双目、点云和多模态数据的方法。现有的学习资料主要集中在论文和开源代码中。上手难,踩坑容易。
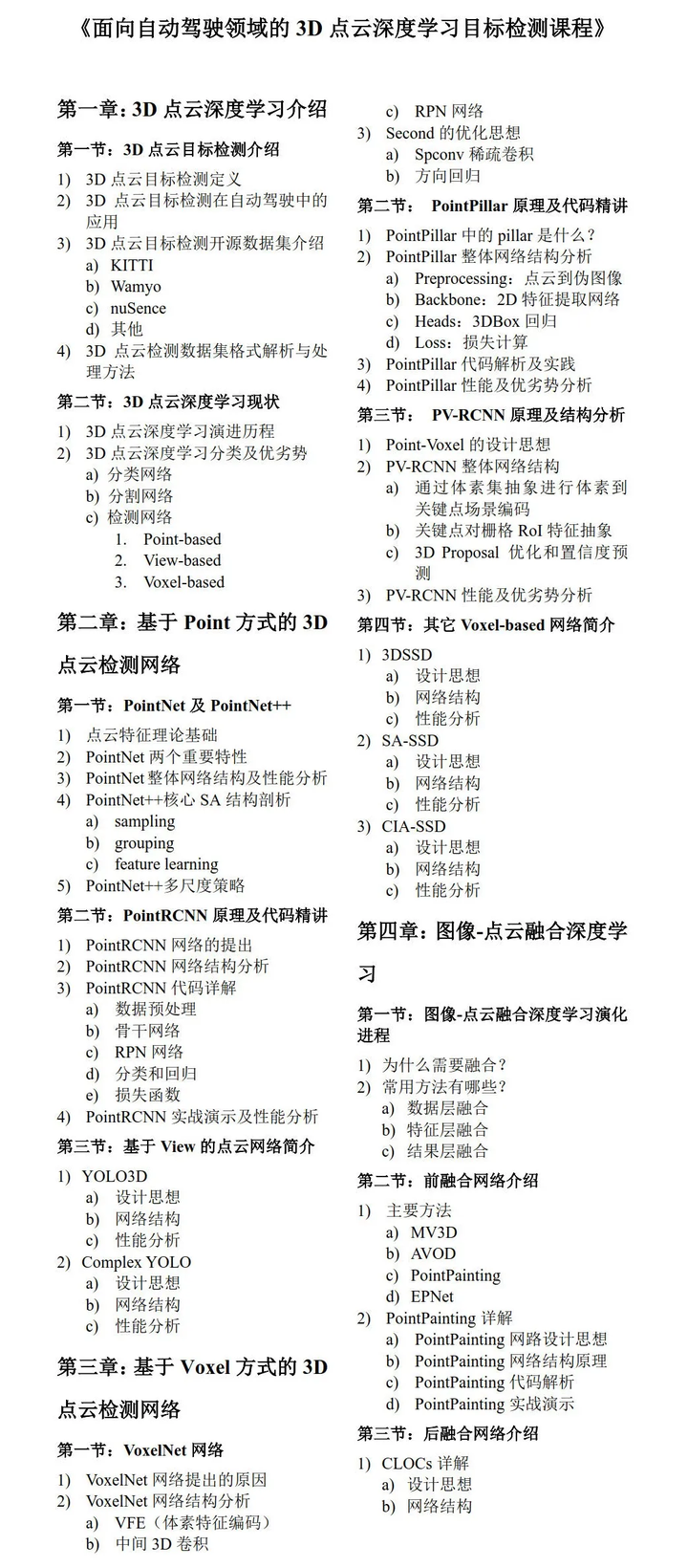
本课程还推荐了国内首个自动驾驶3D点云目标检测课程。本课程将重点介绍3D点云的深度学习,以及Point-based和Voxel-based系列3D目标检测的网络架构。进行系统分析和代码排序,帮助学生更快上手,对点云深度学习有更深入的了解。
课程链接:国内首个自动驾驶3D点云目标检测课程
讲师王曦自动驾驶方向,博士北京理工大学自动化专业。曾就职于多家自动驾驶公司,在自动驾驶感知方面拥有丰富的经验。精通主流视觉感知和点云3D感知方法,实现了多个产品功能模块。
大纲如下: