


在对智能网联汽车基础共性关键技术研究的基础上,杜中机器人深入挖掘智能网联汽车人才教育市场需求,建立了符合智能网联汽车的一站式自主导航教学平台——5G-V2X人才培养法则——自动驾驶教学沙盘,帮助各大高校实验室搭建车联网系统教具,得到国内众多高校和企业的认可。
自动驾驶教学沙盘是北京杜中机器人科技有限公司新推出的面向高校用户教学、科研和竞赛的智能移动平台。该平台将有效支撑自动驾驶方向的科研课题和产品开发,为高校提供智能网联汽车专业教学培训体系和实践环境,助力智能网联汽车专业人才的创新培养。

三个部分
一站式自主导航教学平台分为三部分:V2X车路协同系统、微型智能车、智能路边设备等,下面为大家详细介绍!
一、V2X车路协同系统
车路协同系统是教学平台的核心功能,可全面管控每辆车的实时状态信息、智能路网系统信息和智能路边设备信息。组件可分为自动驾驶系统、车路协同系统、智能云控&远程驾驶系统三部分,构成智慧交通场景下协同感知与协同决策的闭环。
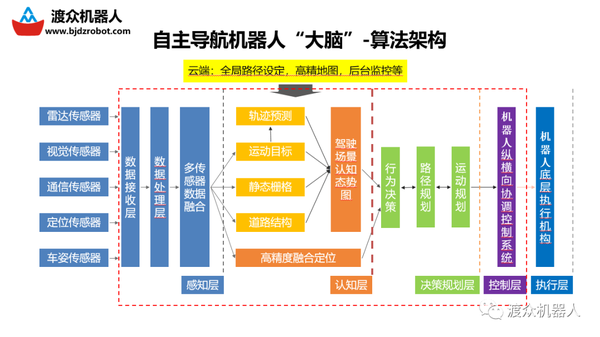
包括用户管理、高精度地图加载、智能车辆加载、车辆路径在线规划、车辆信息实时显示、自行车传感器数据实时显示、路边设备在线控制、远程驾驶、等等
自动驾驶系统,可以实现自行车的智能化,也可以实现多车编队。该车搭载激光雷达、惯性导航、里程表、自动驾驶计算单元等传感器,应用SLAM技术实现基于高精度地图的自动驾驶功能。
它集成了无线通信技术、传感器技术、自动跟踪技术、动态避障技术、嵌入式系统技术、车辆控制技术和图像处理等先进技术。
自动驾驶功能系统由:智能停车系统、智能信号灯系统、交通视频监控系统、车辆定位系统、路线自动导航系统、主视行车视频系统、智能车辆等无人驾驶训练显示系统组成。沙盘智能中控系统可以完成沙盘的整体运行控制和教学的二次开发。
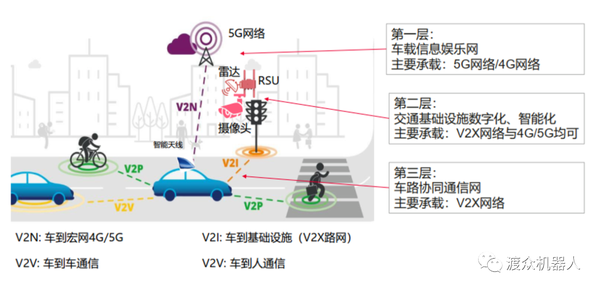
车路协同系统自动驾驶编队,车路协同V2X(Vehicle to Everything)是车辆与外界交换信息的一种通信方式。主要包括车辆与车辆之间、车辆与行人之间、车辆与道路基础设施之间、车辆与云端之间的通信。
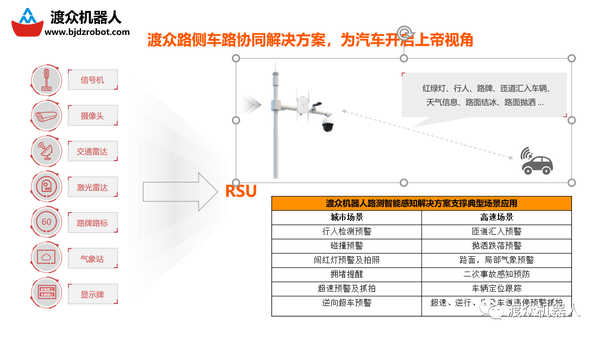
车路协同云控系统,车路协同云控应用主要分为两大类功能应用:超视距感知下的预警引导和协同决策应用。
其中超视距感知下的预警引导应用通过云控路边感知基站和车云通信实现车路协同感知,以及实时本地驾驶层面动态地图融合更新自动驾驶编队,为各级自动驾驶提供实时空中监控。广域视距和广域精细感知信息,实现稳定且高适用性的多种预警和引导类联网应用,帮助车辆可靠检测危险,优化驾驶行为。

远程驾驶系统,北京杜中机器人自主研发的远程5G并行驾驶系统,通过方向盘远程控制车辆前进、转弯等动作。通过wifi实时传输视频信息。并且可以一键切换到自动驾驶模式。
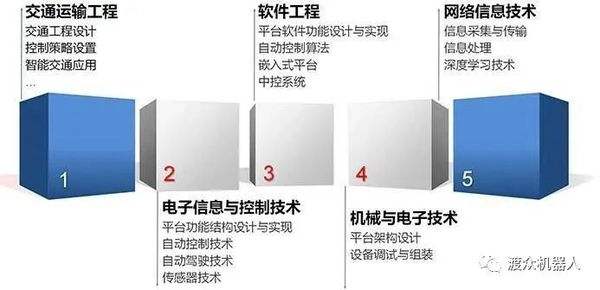
以上系统涉及交通控制、交通管理、车路协同、交通安全、自动驾驶等应用,面向交通、自动化、软件工程、通信工程、车辆工程等高等院校和职业院校开发专业方向 为相关前沿学科和专业建设提供实验平台和教学指导。
二、迷你智能车
迷你智能车采用阿克曼转向模式,与实车一致。可提供雷达、图像、定位等传感器设备,软件配备相应的传感器SDK,包括相应的采集、处理、目标特征识别和目标跟踪。此外,我们还为高校师生开放了无人值守基础算法库,让师生们可以快速开启无人值守知识研究领域。
三、智能路边设备
车路协同是无人系统发展的必然趋势。智能路边设备可以使无人驾驶车辆在复杂交通流中进行监督、协调和遵守规则。
功能:1.可以实现智能汽车的角色分配;
2.车辆可以根据行驶轨迹自主行驶;
3.实现车联网;
4.可实现车辆的自动编队和跟随行驶;
5.汽车自动充电系统;
6.可实现自适应速度控制和等速巡航;
7.可根据信号灯实现车辆走走停停;
8.软件演示培训;
9.可以自动超车和变道。
技术特点
依托先进的智能网联汽车行业技术,都中一站式自主导航教学平台具有以下特点:
● 硬件设备多样,冗余度高;支持多传感器信息融合算法;平台可开发性和可扩展性;
● 支持开源的ROS机器人操作系统,提供一系列DEMO从浅到深学习ROS自主导航,并提供相应的文档教程和视频教程。
● 可实现路径规划、车道线识别、自动停止障碍物、基于网络的红绿灯和交通标志识别、定位补偿、定位感知等算法。
● DZ20自主导航移动机器人体积适中,可灵活部署在机器人教学实验室中。
应用案例
北京某大学汽车实训室
都中机器人是北京某大学的汽车培训室。基于V2X教学沙盘构建教学培训环境。智能微型车辆交通功能场景模块,可满足仿真开发测试、教学研究的需要。